SLAM 之 cartographer 安装
- 环境:Ubuntu20.04->
noetic
安装依赖
基本的
1 | sudo apt-get install -y \ |
对于cartographer环境安装脚本
下载压缩包carto脚本
解压缩,进入文件夹,右键空白在终端打开。
1 | chmod +x auto-carto-build.sh #赋予执行权限 |
等待编译完成,时间较长,耐心等待。
下载cartographer
下载
Ctrl+Alt+t打开终端
1 | #下载项目 |
将下载好的文件夹重命名为cartographer_ws
编译 cartographer
运行工作空间下的 catkin_make.sh 脚本。脚本中的内容其实就是catkin_make_isolated --install --use-ninja,外加source install_isolated/setup.bash
1 | cd ~/cartographer_ws #进入目录 |
注意:每修改一次源码,就要重新删除之前编译的文件,重新编译。若要测试,请先看[测试],修改完路径再编译,省点时间。
1 | ./rm_build.sh #删除编译生成的文件 |
- 时间很长~~~~
当没有出现报错,基本已经成功。
测试
下载bagfiles
这里都将使用李想大佬修改过的launch文件,进行建图。因为launch文件将会自动播放bagfile包,所以我们需要修改launch文件中的bagfile存在的路径,具体如下
修改路径
例如,我的路径是/home/<user name>/Downloads/rslidar-outdoor-gps-notf.bag
在~/cartographer_ws/src/cartographer_ros/cartographer_ros/launch/lx_rs16_2d_outdoor.launch文件中,修改下图所选路径为你文件所的路径。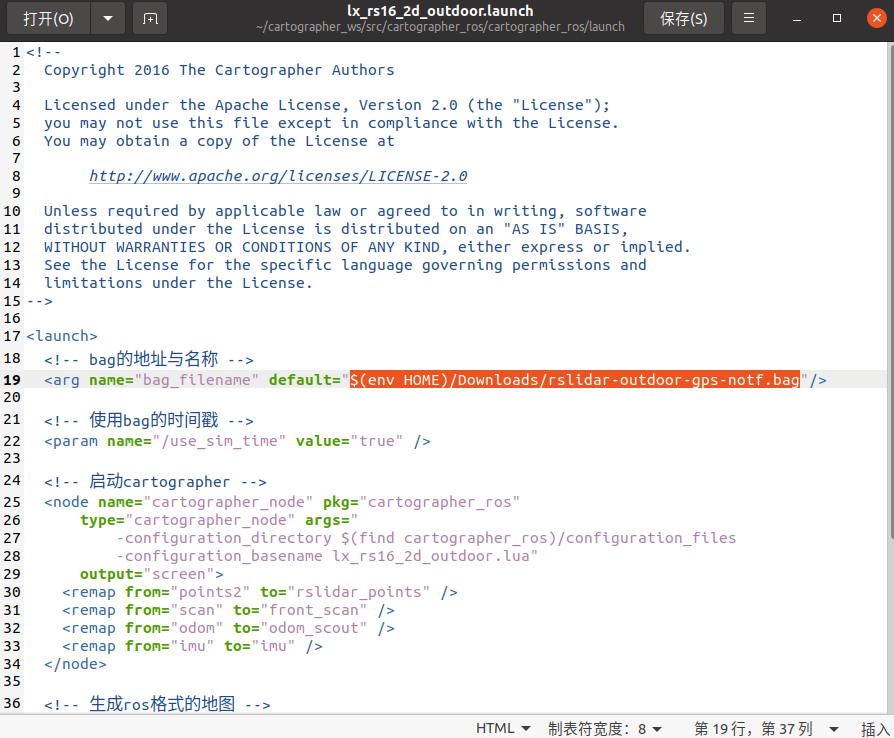
- 修改完请重新编译。
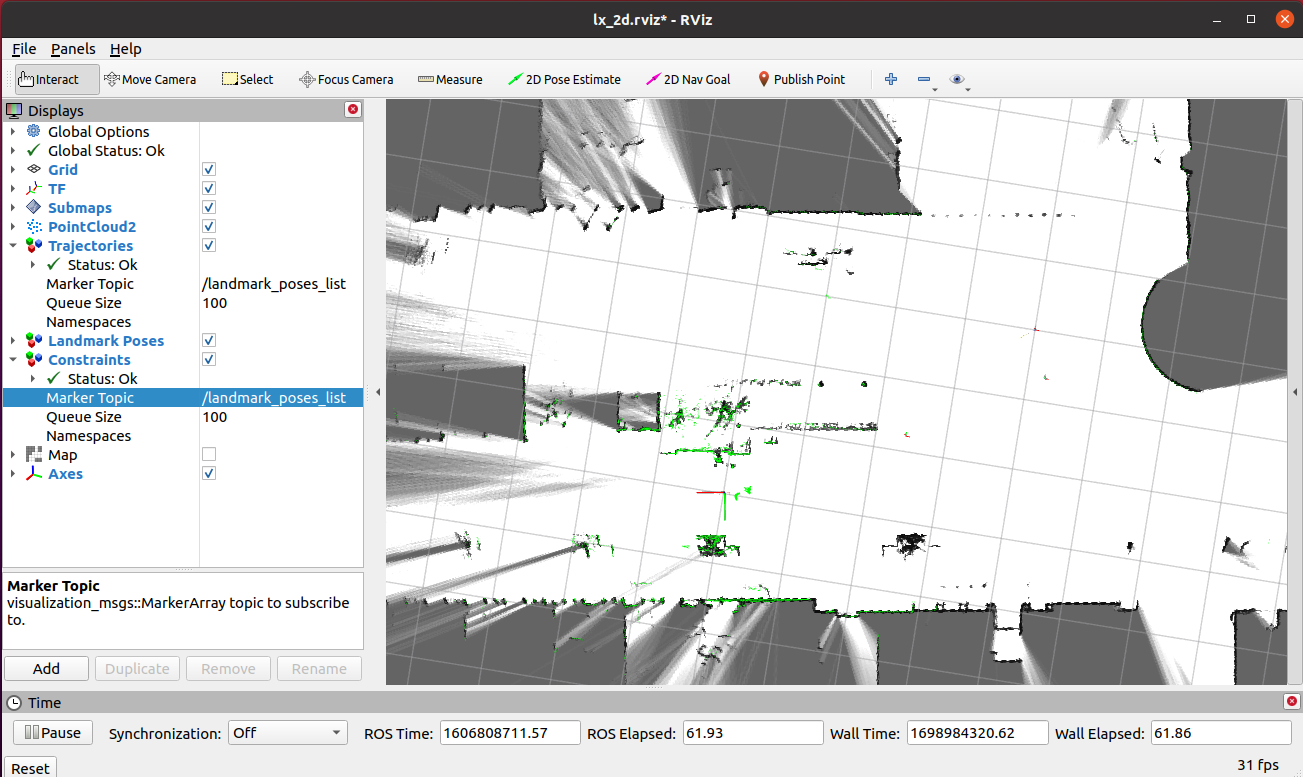
测试
我们通过play对应的bagfile可以模拟对应的传感器的数据,而不需要连接传感器硬件,非常方便。这里我们也将使用到别人已经录制好的bagfile。
1 | cd ~/cartographer_ws #进入对应工作空间 |
评论